

Wszystkie produkowane silniki elektryczne posiadają trwale zamocowaną tabliczkę znamionową z wykazem wszystkich istotnych danych charakteryzujących dany model silnika. Pozostałe, bardziej szczegółowe dane zwykle są dostępne w katalogu silnika.
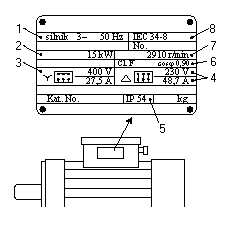
Tabliczka znamionowa dla dwubiegunowego silnika 15 kW może mieć następujące dane:
Cyfra 1
Silnik trójfazowy dla sieci zasilania o częstotliwości 50 Hz.
Cyfra 2
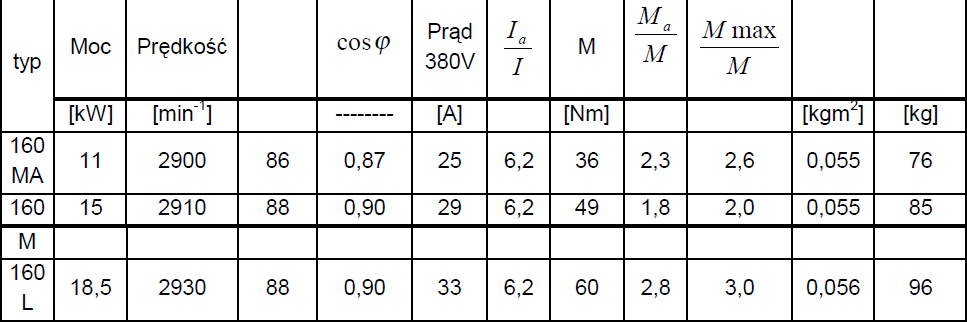
Moc silnika wynosi 15 kW, tj. silnik jest zdolny przekazywać na wał, co najmniej 15 kW, jeżeli podłączony jest do wskazanej sieci zasilania. Zostały stworzone standardowe typoszeregi silników asynchronicznych ze względu na wartość mocy wyjściowej. Pozwala to użytkownikowi na odpowiedni dobór silnika kierując się jego przeznaczeniem. W typoszeregu występują moce silników jak w tabeli 1.

Obecnie zwykle używaną jednostką dla określenia mocy silnika jest wat [W], który jest zamienny z koniem mechanicznym [HP] i przelicza się go następująco: 1 KM=0,736 kW.
Cyfry 3 i 4
Uzwojenie musi być połączone w "trójkąt" lub "gwiazdę". Jeśli napięcie zasilania wynosi 400V to uzwojenia silnika muszą być połączone w "gwiazdę". Prąd fazowy silnika wynosi wtedy 27.5A. Jeżeli napięcie sieci zasilania wynosi 230V, uzwojenie musi być połączone w "trójkąt". Prąd fazowy wynosi wtedy 48.7A. W początkowej fazie rozruchu silnika, kiedy prąd jest od 4 do 10 razy większy od prądu normalnego, sieć zasilania może być przeciążona. Spowodowało to wydanie przez zakłady energetyczne rozporządzeń zalecających obniżenie wartości prądu podczas rozruchu dużych silników. Może być to dokonywane na przykład, przez połączenie uzwojeń silnika podczas rozruchu w gwiazdę, a później przełączenie w trójkąt.
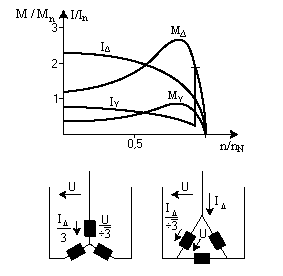
Moment obrotowy silnika, którego uzwojenie połączone jest w gwiazdę, zmniejsza moc i moment obrotowy do 1/3, dlatego silnik nie może startować z pełnym obciążeniem. Silnik zaprojektowany do pracy w połączeniu uzwojeń w gwiazdę zostanie przeciążony, jeśli nie posiada wyłącznika do połączenia w uzwojeń gwiazdę dla pracy z pełnym obciążeniem.
Cyfra 5
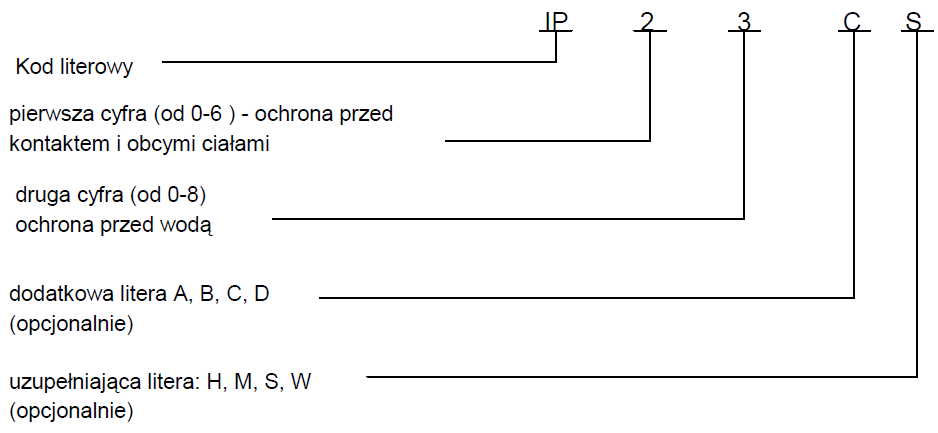
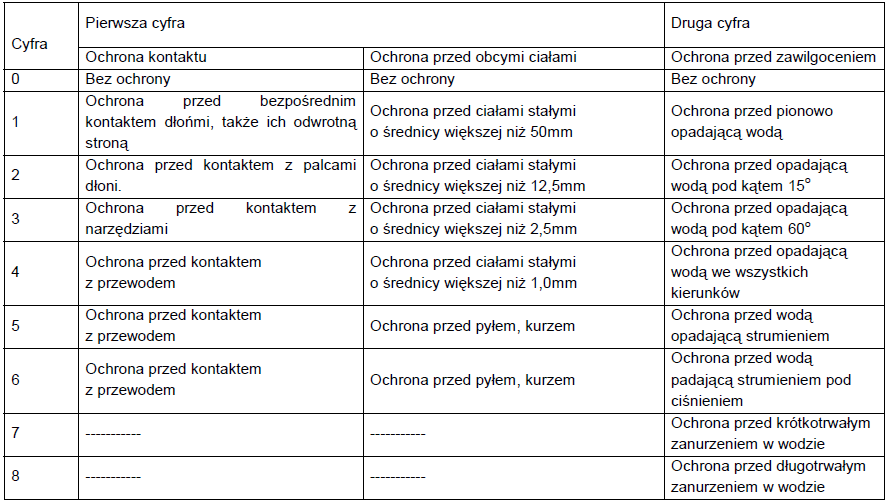
Rodzaj ochrony, jaką spełnia silnik wskazuje stopień ochrony przez obudowę zabezpieczającej przed przenikaniem do wnętrza silnika płynów i obcych ciał. Rys. 3 zawiera opisy stosowanych stopni ochrony obudów silników według międzynarodowego standardu IEC - Publikacja 34-5. Zastosowanie ochrony i jej rodzaj są wskazywane przez dwie litery IP (International Protection) i dwie cyfry. Cyfry są używane, aby wyszczególnić poziom ochrony silnika przed kontaktem dotykowym i obcymi ciałami (pierwsza cyfra), oraz przed płynami (druga cyfra). Jeżeli wymagane są dodatkowe litery, mogą być one dodane. Podstawowy układ kodu IP wygląda następująco:
Ważne, aby zapamiętać, że:
Dodatkowe oznaczenia literowe wskazują, w jaki sposób ludzie są zabezpieczeni w miejscach niebezpiecznych:
Oznaczenia się wzajemnie uzupełniają i dostarczają informacji o zagrożeniach w szczególności:
W przypadku, gdy w maszynie jest zapewniona chroniona przeciw zanieczyszczeniom zewnętrznym takim jak np.: pył lub kurz, umieszcza się w oznaczeniu pierwszą cyfrę 5. Ochrona taka nie zapewnia całkowitego odizolowania - jest szczelna dla określonych rozmiarów zanieczyszczeń stałych, lecz w znacznym stopniu ogranicza wpływ zanieczyszczeń zewnętrznych na bezpieczną i długotrwałą pracę tejże maszyny elektrycznej.
Cyfrą 6 oznacza się wykonanie ochronne przeciw wodzie i spełnia wymagania wszystkich innych niższych oznaczeń. W systemie oznaczeń symbol IP X7 określa jako dopuszczane chwilowe zanurzenie, IP X8 oznacza jako dopuszczane ciągłe zanurzenie. Powyższe wymagania ochrony przed wodą uwzględniają wymagania dotyczące ochrony przeciw wodzie opadającej także strumieniami IPX5 czy silnymi strumieniami wody IPX6. Jeśli dwa rodzaje zagrożeń mogą wystąpić jednocześnie urządzenie musi mieć podwójne oznaczenie, np. IPX5/IPX7
Przykład: IP 65 mówi, iż silnik jest bezpieczny ze względu na dotyk i ma ochronę przed zanieczyszczeniami zewnętrznymi oraz silnym strumieniem padającej wody.
Cyfra 6
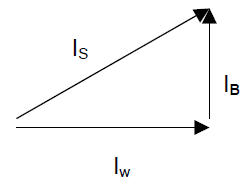
Prąd Is, który jest pobierany przez silnik, nazywany prądem pozornym dzieli się na dwie składowe: czynną Iw i bierną Ib. Cosφ ilustruje procentowy udział prądu czynnego w prądzie zasilającym silnik w warunkach nominalnych. Składowa czynna prądu zasilania silnika odpowiada za moc czynną na wale silnika a składowa bierna prądu zasilającego jest potrzebna do wymuszenia pola magnetycznego w silniku. Gdy pole magnetyczne jest okresowo usuwane moc magnesowania jest oddawana do sieci zasilania.
Określenie "bierny" oznacza, że ten prąd jest przesyłany do i z przewodów bez wpływu na wartość mocy czynnej na wale silnika.
Prąd pozorny pobierany z sieci zasilania, jego składowa czynna i bierna nie sumują się wprost arytmetycznie silniku, gdyż są przesunięte w czasie względem siebie Wielkość przesunięcia między składowymi prądu zależy od częstotliwości napięcia zasilania. Dla częstotliwości 50Hz przesunięcie wynosi 5ms, a ich suma geometryczna wynosi:
![]()
Prąd silnika IS i jego składowe IW i IB mogą być przedstawione jako ramiona trójkąta prostokątnego, w którym długość przeciwprostokątnej jest pierwiastkiem kwadratowym sumy kwadratów długości przyprostokątnych - składowych IW i IB ( wg geometrii Pitagorasa).
φ to kąt pomiędzy prądem IS i jego czynną składową IW. Cos φ jest współczynnikiem określającym zależność pomiędzy wielkościami tych prądów:
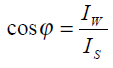
Cos φ może również przedstawiać stosunek pomiędzy mocą czynną i pozorną:

Wyrażenie "moc pozorna" oznacza, że tylko część tej mocy jest wykorzystywana do wytworzenia mocy czynnej na wale silnika. W tym przypadku wartość mocy czynnej determinuje składowa IW prądu pozornego.
Wybór silnika musi uwzględniać rodzaj aplikacji, a także warunki wykonania instalacji.
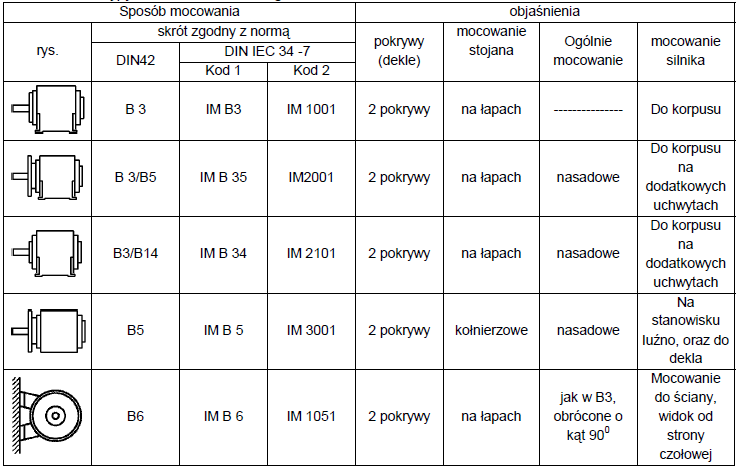
Międzynarodowe normy IEC 34-7 podają również typy mocowań silników, które oznacza się dwoma literami IM (ang. International Mounting) i czterema cyframi. Przykładowe formy mocowań podane są w tabeli nr 4.
Tabliczka znamionowa zawiera tylko podstawowe parametry elektryczne silnika. Inne wielkości charakteryzujące silnik można wyliczyć korzystając ze wzorów np.: moment znamionowy.
![]()
Sprawność silnika η można określić jako iloraz pomiędzy mocą na wale a mocą elektryczną pobieraną przez silnik z sieci zasilania i oblicza się ze wzoru:

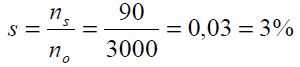
Poślizg silnika s można określić na podstawie danych z tabliczki znamionowej, która podaje nominalną prędkość i częstotliwość napięcia zasilania. Te dwie wielkości wskazują na dwa bieguny silnika, jeśli silnik osiąga prędkość synchroniczną 3000 obr/min. A więc poślizg silnika ns wynosi:
![]()
Poślizg normalnie podawany jest w procentach i wynosi:
Moc silnika, prędkość wirnika, cosϕ, prąd silnika, częstotliwość są zamieszczone na tabliczce znamionowej i tworzą podstawową informację o silniku. Sprawność i moment można wyznaczyć bazując na danych z tabliczki znamionowej.
Ponadto katalogi podają, że prąd rozruchowy Ia silnika o mocy 15kW, jest 6,2 razy większy od prądu znamionowego silnika IN.
![]()
Moment rozruchowy Ma jest określony jako 1,8 większy od momentu znamionowego i wynosi
![]()
Ten moment rozruchowy wymaga prądu o wartości 180A, co należy uwzględnić przy projektowaniu sieci zasilania. Moment krytyczny silnika Mk jest dwukrotnie większy od momentu znamionowego.
![]()
Poza tabliczką znamionową dane na temat silnika można znaleźć również w jego karcie katalgowej. Przykład takiej karty zamieszczono poniżej:
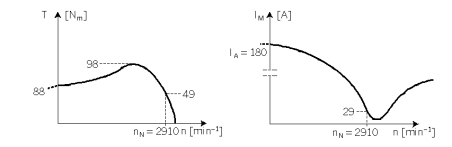
W katalogu silnika najczęściej producent zamieszcza również charakterystyki mechaniczne danego modelu:
W końcu moment bezwładności i waga silnika są określone na tabliczce znamionowej. Moment bezwładności jest wykorzystywany do określenia momentu przyśpieszenia. Waga silnika jest istotną daną dla celów transportowych, instalacyjnych i montażowych.
Część producentów silników nie publikuje wartości momentu bezwładności i podaje w miejsce tego parametru moment zamachowy WR². Jednak tę wielkość można przekształcić wg wzoru:

źródło: Dr inż. Jerzy Szymański, ELPOL Centrum Elektroniki i Automatyki Sp. z o.o. (www.elpol.biz)



 Zarejestruj się
Zarejestruj się Nasz blog o falownikach
Nasz blog o falownikach Znajdź nas na Twitter
Znajdź nas na Twitter Znajdź nas na Facebook
Znajdź nas na Facebook Odwiedź nas na Google+
Odwiedź nas na Google+